



漁業環境監測取水生動物舉動監督
漁業養殖水體的溫度、濁度、溶氧量(DO)、pH值、非離子氨(NH3)濃度、亞硝酸鹽濃度等環境因子是水體質量的要害評價因子,對水生動物可否開展一般吐故納新具有明顯危害,是以必需對水體環境質量評價因子開展實時監測,必要時開展實時調控。取此同時,水生動物的舉動取環境狀態密切關系,對水生動物開展跟蹤拍攝、舉動看管也是漁業主要的觀察環節。傳統的漁業水下觀察需求潛水員潛入水中功課。正在水深大于20m時,潛水員輕易涌現胸悶、頭昏等不適癥狀,海枯石爛有罹患減壓病的風險。今朝常用的環境監測辦法為浮標正在線監測法,它僅能測定有限固定點的水質參數,方便對水體開展3維空間上的靜態監測,運用水下機器人則可有用辦理此題目。
自立式水下機器人(AUV)的體積、最小轉彎半徑一樣平常較大,多適用于深遠海漁業環境,國內外均有研究者利用AUV對深遠海的水生動物及其生存環境開展研究。有研究者利用美國Hydroid公司取伍茲霍爾海洋研究所(WHOI)研發的REMUS-100長途環境監測AUV[8](圖1)合營電子標簽對棱皮龜、姥鯊開展跟蹤看管[9-10],并憑據REMUS-100的傳感器取視頻流數據獲得了水生動物的舉動及其棲息地信息,但該AUV的有效載荷(傳感器組件質量)較小。Eichhorn等利用德國弗勞恩霍夫(Fraunhofer)應用研究增進協會開辟的CWolf型AUV搭載模塊化水質傳感器組件(圖2)對挪威東部漁場四周海疆的水質參數開展了實時監測,CWolf的有效載荷到達15kg,但其本體質量為135kg,實際利用時最少需求3人合作布放。
圖 1 REMUS-100 自立式水下機器人
圖 2 CWolf 自立式水下機器人及傳感器組件
大都AUV正在開展漁業環境監測時,因裝備有螺旋槳推進器、舵翼或電子標簽等,會對環境及水生動物發生較大滋擾。WHOI的Yoerger等研制的名為Mesobot的水下機器人(圖3)裝備了大直徑、慢轉速的螺旋槳,能夠將其對水體的擾動降到最低,它與此同時裝備的海洋探測傳感器組件能夠對海洋“暮光帶”中層水域(深度介于200~1000m之間)開展環境監測,Mesobot機器人還能對挪動遲緩的水生動物開展跟蹤監督(圖4)。別的,東京大學Maki等開發了運用多波束成像聲吶對水生動物開展跟蹤的AUV,免除電子標簽對水生動物的危害。
圖3 Mesobot 的3維模子及正在水下狀況
圖 4 Mesobot 跟蹤水生動物示意圖
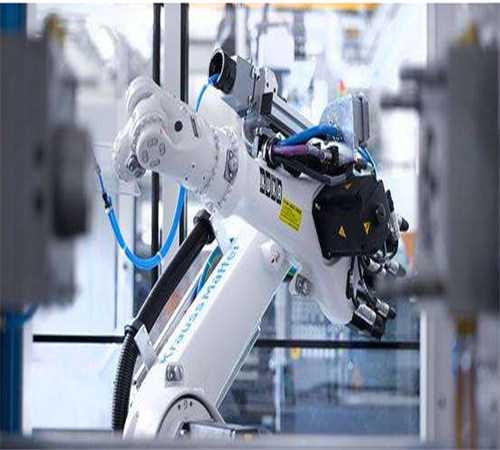
圖 5 麻省理工學院研制的 AMOUR V
遙控式水下機器人(ROV)適適用于近淺海漁業環境和結構化、工業化的淡水漁業環境。麻省理工學院(MIT)計算機取人工智能實驗室Vasilescu等研造了適用于近淺海、淡水漁業環境的圓柱形ROV——AMOURV(圖5),AMOURV根據調治浮力取總重力間的均衡來實現懸停,其有效載荷變更范疇為0~1kg。針對近淺海網箱養殖水體大、養殖密度高(通常跨越20萬尾)的題目,挪威科技大學(NTNU)的Osen等造作了低成本的ROV(圖6),利用3個小型螺旋槳推進器實現了橫移、進退取偏航3自由度(DOF)的活動,對近淺海漁業的水下環境實現了多因子的感知。Huang等研造了適適用于4~5m水深環境的ROV(圖7),該ROV專適用于淡水漁業環境監測。
圖 6 挪威科技大學的水下機器人
圖 7 西北農林科技大學漁業環境監測 ROV
考慮AUV取ROV會驚嚇水生動物的題目,有研究者開發了具有仿生外形或基于仿生活動機理的水下環境觀察取水生動物看管專用機械人。圖8為中國科學院自動化研究所(CASIA)研制的服務于水生態環境建立的仿豹魴鮄BUV,該機械人可定點懸停并對多點水質參數舉行監測。圖9為麥吉爾大學設計的名為AQUA的第一代兩棲環境監測BUV,經過6片扁平腳蹼撲動實現水下浮游。圖10為麻省理工學院設計的基于聲學通信模塊操縱的軟體機械魚SoFi,SoFi頭頂部安裝有魚眼攝像機,可對水深處于0~18m范圍內的魚類舉行觀查而沒有導致驚擾,SoFi已對太平洋珊瑚礁鄰近的魚類舉行了實地跟蹤看管。多半BUV體積較小,較AUV、ROV更簡單融入生物環境,能更好地順應漁業生產環境。
圖8 中國科學院自動化研究所研制的仿生水下機器人
圖 9 AQUA 兩棲監測機器人
圖 10 SoFi 軟體機械魚的 3 維模子
表1歸納了當下國內外具有代表性的適用于環境監測的水下機器人。
除直接對水質參數舉行監測和對水生動物舉行監督以外,另有研究者開發了一類對特定水質參數敏感的機器人,此類機器人根據仿照水生動物關于某一非常的環境因子做出的應激反響來間接地反響水質的惡化。佛羅倫薩大學的Ravalli和馬德里理工大學的Rossi等結合研制了一種專適用于水產養殖場合的、關于氫離子(H+)濃度敏感的水下機器人(圖11),該機器人運用外形影象合金(SMA)執行器來驅動柔性布局,將水質非常時的化學旌旗燈號轉換為驅動該機器人活動的電旌旗燈號,根據機器人差別的活動形式來捕獲養殖環境中pH程度的變更。魚類的舉動變更取養殖環境密切關系,能夠作為水質監測的根據,據此能夠設計出能作為養殖水質非常預警器的水下機器人,進而實現智能化的漁場治理。
圖11 氫離子(H+)敏感水下機器人
整體來講,運用各類水下機械人搭載各類水質、圖象傳感器對環境取水生動物舉行觀察是水下機械人在漁業中使用的研討熱門,相干樣機較多。但今朝能現實使用的具有較高智能水平的水下機械人仍舊較少,很難分身水下環境切確傳感的高技術性取規模化使用的經濟性,這是制約環境監測型水下機械人遍及使用的重要原因。
2.2.1 水下視覺體系正在捕捉中的運用近況
圖12 水下視覺體系幫助捕捉
第1階段的水下視覺體系經過水下攝像機取得水生動物的尺寸取位置信息后反饋給操縱體系,以開環操縱的體式格局驅動機械手或經過人工操作機械手的體式格局來捕捉方針。日本巖手大學的Takagi等設計了較量爭論鮑魚尺寸的水下機器人,將尺寸數據反饋給漁民舉行捕、放決議計劃;九州工業大學的Ahn等經過水下機器人獵取水生動物的位置信息,并反饋給操作者遙控機械手以對方針舉行抓取。基于此種視覺體系的水下機器人的捕捉自動化水平較低,捕捉過程中須要人力參取,沒法自立捕捉挪動方針。
第3階段的水下視覺體系具有自學習才能,可正在機械人活動過程中取得四周水下環境、方針狀況信息來幫助操縱體系對機械人開展實時操縱,是將來智能化捕捉開展的標的目的。現階段到達水下視覺體系的第3階段的水下捕捉機械人仍鮮有報導。大批水產品或大范圍內的水產品捕捉,多以拖網體式格局開展。水下視覺體系正在拖網捕捉中亦有幫助使用,已經有研究者操縱水下機械視覺技能針對魷魚的噴射游離行動改善拖網設計。
當前,將水下視覺體系利用于漁業場景時的關鍵利用層面仍是將其作為拓展人類眼力能及范疇的手腕。大都的基于人工智能視覺體系的水下機器人仍處于正在機器人操作體系(ROS)等機器人二次開發平臺上模仿的階段,現實利用中需要正在環境、硬件前提和體系穩定性之間作出衡量。
2.2.2 水生動物捕捉機器人運用近況
當代電機體系捕捉功課的工具主如果魚類取底棲型海珍品。對魚類的捕捉關鍵運用拖網體式格局,現有的水下捕捉機器人捕捉工具以具有高附加值的海珍品取科考探索生物為主。
圖13 水生動物捕捉機器人使用近況
根據水下機器人結尾執行器捕捉水生動物的行動情勢來分別,能夠將捕捉情勢分為包絡抓取取精準抓握。連系結尾執行器動力起原及質料的分歧,現正在正在漁業場景中已有探索性運用的捕捉體式格局包含:(1)運用開式鏈(圖13(a))、可變形陸續體(圖13(b))、網籠狀(圖13(c))和容器狀構造(圖13(d))實現對水生動物的接觸式或非接觸式包絡圍攏;(2)運用電動機驅動金屬質料(圖13(e))或塑料(圖13(f))等抗壓強度較高的硬質質料對水生動物舉行夾持抓握;(3)根據液壓、氣壓驅動柔性質料實現對水生動物的包絡、夾持(圖13(g));(4)根據液壓泵、氣壓泵[38]制作壓力差,實現對水生動物的吸納(圖13(h))。
大都適用于捕捉水生動物的水下機器人接納以齒輪、搭鈕、連桿、鉗和鑷等剛性構造為底子的機械手對目的開展抓取,近年來研討者研制了捕捉水生動物的柔性抓手,接納柔性資料來低落或去除抓取進程對水生動物導致的損害。文[27]報導了一種適用于近淺海漁業環境的柔性抓手,將該抓手安裝于ROV上可實現對海珍品的較高效、無損的精準抓取。但柔性抓手的抓取行動的反復定位精度取節制的穩健性會低落,取水下機器人本體間的耦合干系正在水下環境中變得非常龐雜,難以依據目的位置開展運動學反解,并且柔性抓手抓取的靈活性常常以捐軀載荷才能為價值。若何進步柔性抓手的可靠性取載荷才能是將來實現對易損目的抓取的研討熱門之一。
除研制柔性抓手以外,有研究者正在剛性機械手的抓取執行器中參加力覺/力矩傳感器、滑覺傳感器等觸覺反應傳感器或電流/電壓反應單位,以防過大的抓取力對植物方針導致損害。開辟具有主動順應性(抓取力掌握)和被動順應性的低慣性、自適應機械手是滿意水生植物無損抓取需求的主要方式。
相較于工業機器人, 漁業場景下機器人的功課工具最大的特點是其會對四周刺激做出反映游離行動,故現階段大都水下捕捉機器人只適用于捕捉挪動較為遲緩的底棲型水產品植物,且關鍵聚焦于具有高附加值的海珍品或水生植物科學探索。
水生動物生存環境保護
近年來海洋網箱養殖發展迅速,截止2019年,我國海洋網箱已達1.94萬只。但網箱網衣因具有多孔、表面積大的特色而尤其合適藻類、藤壺等污損生物的附著,若不實時掃除將會危害水體互換,致使漁業資源品格降低。而在工業化循環水養殖中,魚池底部存在殘餌取魚類固體排泄物等沉積物,溶于水中會致使養殖水體中的氨氮含量增添而使養殖環境惡化,是以須要實時去除。對水生動物的生存環境舉行按期保護是進步水產品格量的重要措施。另外,網衣巡檢、補漏、提升等也是水生動物生存環境保護的重要內容。
圖 14 水下噴洗機器人
正在海洋漁業中,網衣巡檢是一項主要的事情,網衣損壞不只會導致經濟的損失,甚至會帶來生物入侵的嚴重后果。針對網箱網衣洗濯的水下機械人,總體上仍處正在對洗濯射流取機械人本體的水動力學模子舉行理論設計的階段。國內有研討者對洗濯網衣射流的噴嘴關頭參數舉行理論闡發,為水下機械人行使高壓扭轉水射流洗濯網衣給予了理論基礎。為使機械人正在水下洗濯功課中能實現安穩活動,國內有研討者提出行使三角履帶輪及射流反沖安裝實現機械人網箱貼附行走的方式],有研討者對利用螺旋槳取噴射水流的水下機械人舉行水動力學均衡闡發,也有研討者提出測算水動力系數的方式,為創立完全的龐雜水下洗濯機械人的水動力學模子給予了更快速正確的方式。所述研討為水下機械人正在水下洗濯功課中利用給予了設計理論基礎。
現階段已經有可實際使用的網衣污損檢驗水下機器人,可對網衣破洞及污染狀況開展巡檢,為后續網衣保護補漏給予參考(圖15)。已商品化的較為成熟的水下機器人有日本洋馬(Yanmar)公司開辟的遙控式網衣干凈機器人,該機器人可對海洋網箱養殖中的網衣開展遍歷清刷。
圖 15 網衣巡檢 ROV
關于工業化循環水養殖環境保護,正在清理體例上多采納干凈毛刷舉行接觸式清刷,取此同時用水泵吸除廢水,相干機械人多處于實驗室研制階段。Koyama等針對陸基水產養殖水箱底部沉積物的掃除開發了一種輕質無纜束厄局促的自立式水下機械人,該機械人前端裝備吸污螺旋槳,將沉積物吸入集污箱中,挪動途徑經過預編程設定。胡勇兵等設計了一種魚池清刷機械人,經過內螺旋途徑計劃使洗濯面積均勻覆蓋率達85%以上。Mahmud等基于路線圖算法設計了水箱干凈機械人,有用增加了水箱底部干凈的效力取自立化水平。而關于自然湖泊的漁業環境保護,我國首個漁業水下清污機械人已于2019年正在新疆天蘊三文魚養殖基地投入使用。
存在題目
綜合對3種漁業水下機械人使用近況的剖析,今朝漁業水下機械人正在發展中還存正在以下題目:(1)對植物發展環境的侵入性過大。正在靈活靈活性、低噪聲、低流體擾動取植物低驚擾層面仍存正在不敷,取漁業場景較難相容;(2)正在弱可視前提下難以獵取水下環境中的視覺信息。機械視覺的使用多須要較為抱負的前提,一般請求視覺體系布置正在具有清亮水體、恒定光源取簡練配景的環境中,或請求水下機械人具有較好的硬件資源,而這一些前提正在自然漁業環境中通常難以滿意;(3)靈活掌握堅苦。受水流取非結構化龐雜環境危害,水下機械人難以堅持安穩活動,難以活動至目的地區睜開功課;(4)傳感器難以精準獵取漁業出產、機械人位姿信息。正在多因素滋擾下,機載內、外部傳感器沒有到達漁業事實出產的智能需求。
本文節選自《水下機械人在漁業中的運用近況取關鍵技術綜述》,原刊于《機械人》;作者:許裕良,杜江輝,雷澤宇,蔡雨嫣,葉章穎,韓志英;參考略;轉載請說明信息來歷。